|
(level set gradient) | |
|
(shape gradient) | |
|
|
|

|

|
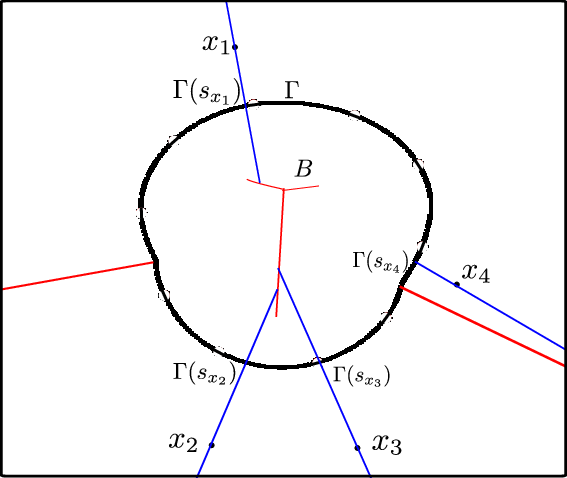
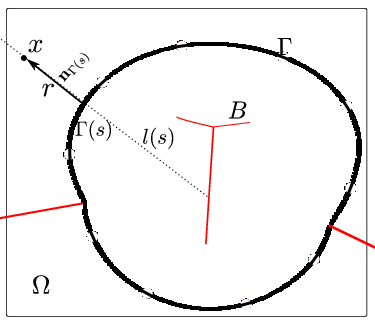
| Skeleton and projection lines | Level-set variations should be constant along projection lines | Change of coordinate system | Idem | Level-set gradient should be integrated over the set of points which share approximately the same projection point |