
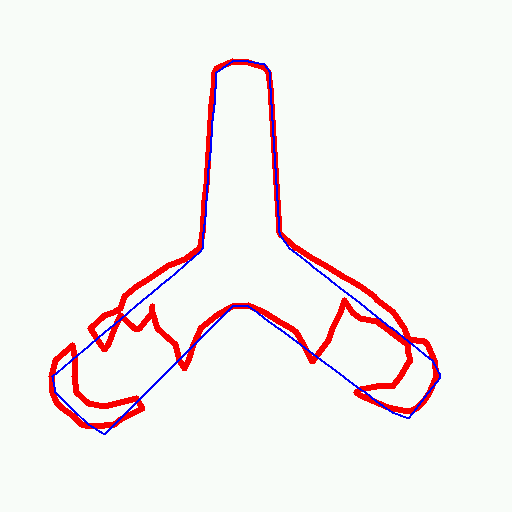
-lisation
-gence
the movie
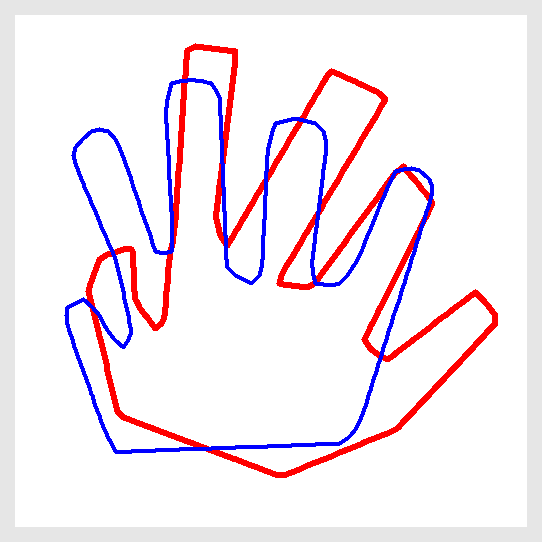
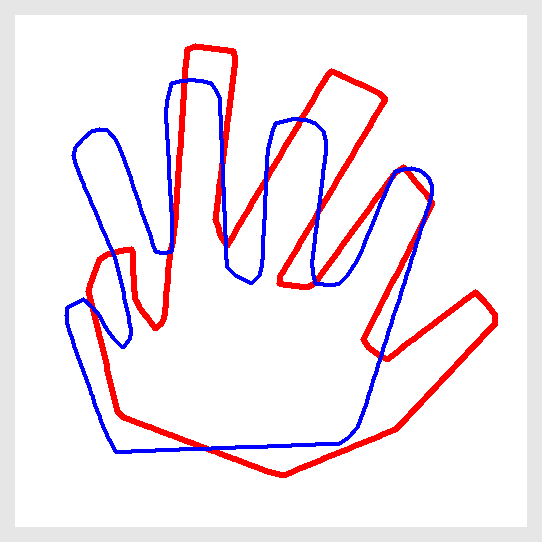
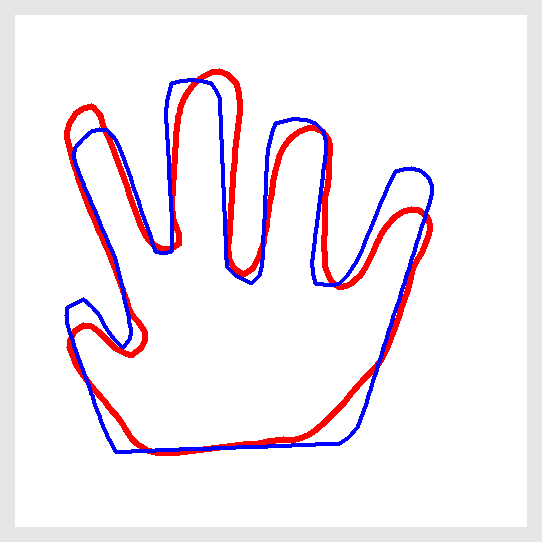
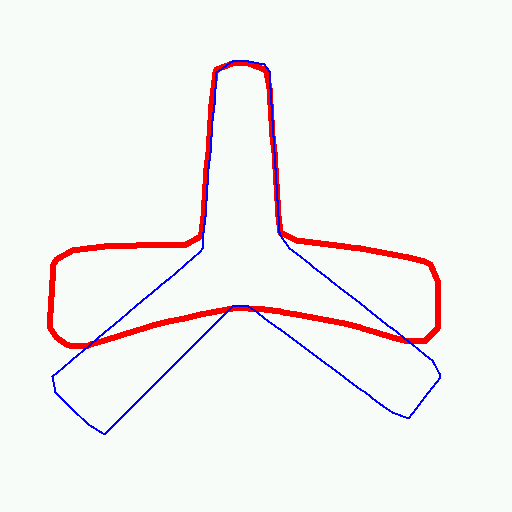
| Standard (L2) prior |
|
|
|
|
| | |
|
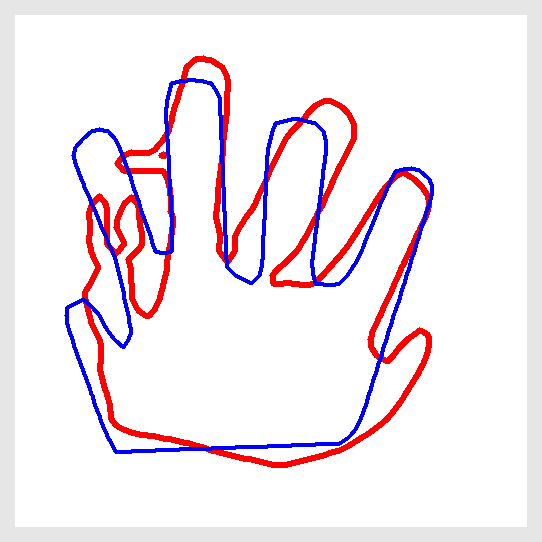
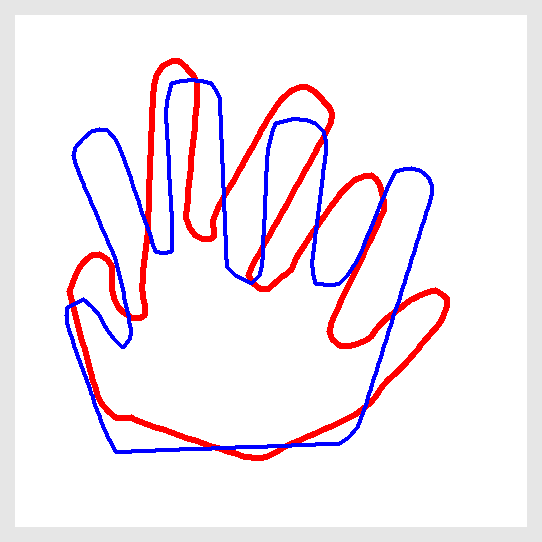
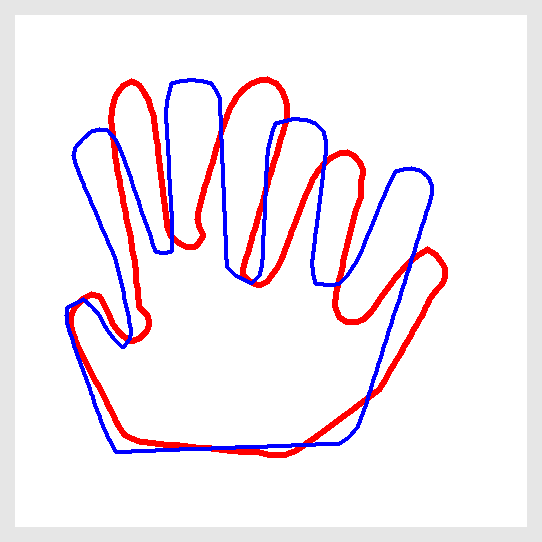
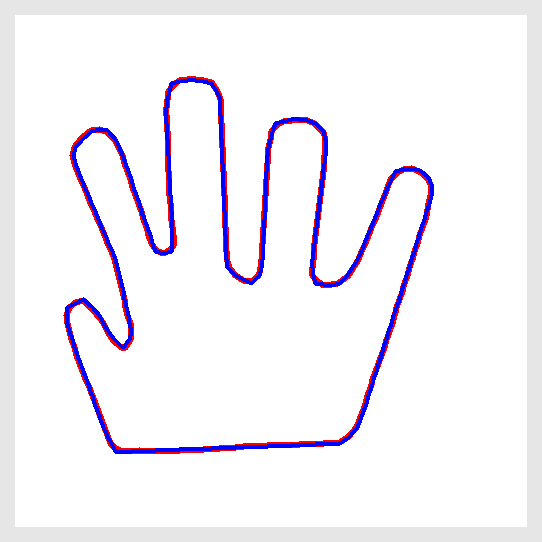
| Rigidifying prior |
|
|
|
|
| | |
|
|
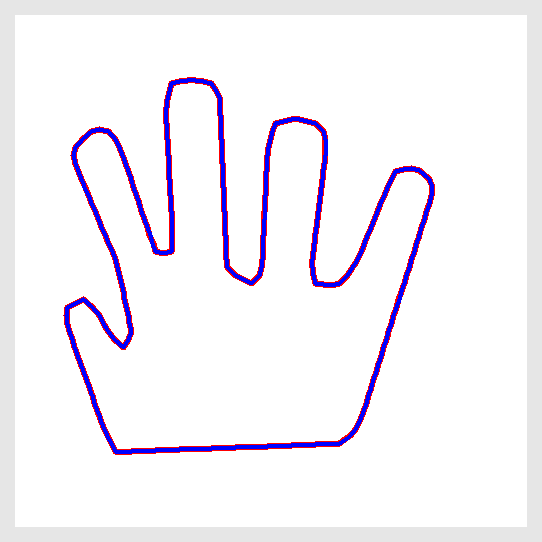
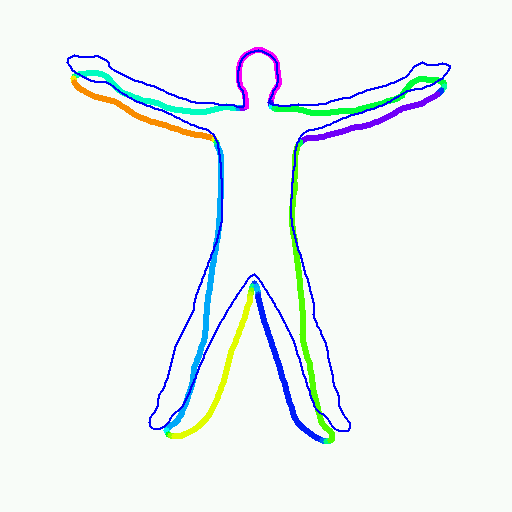
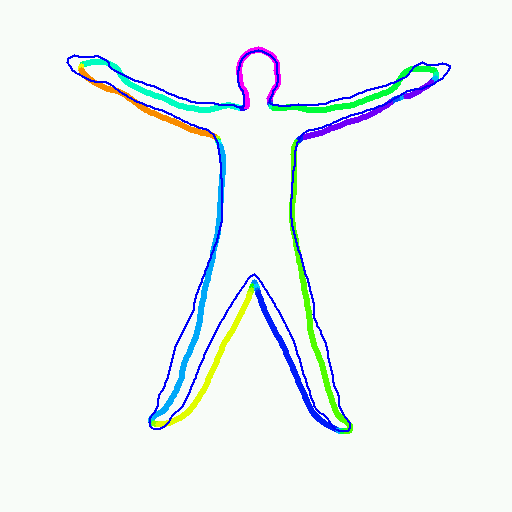
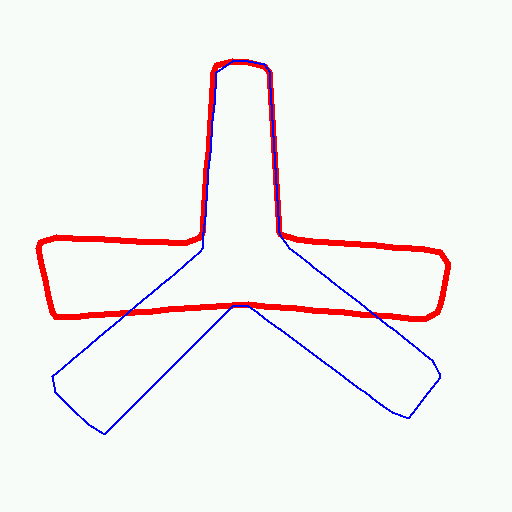
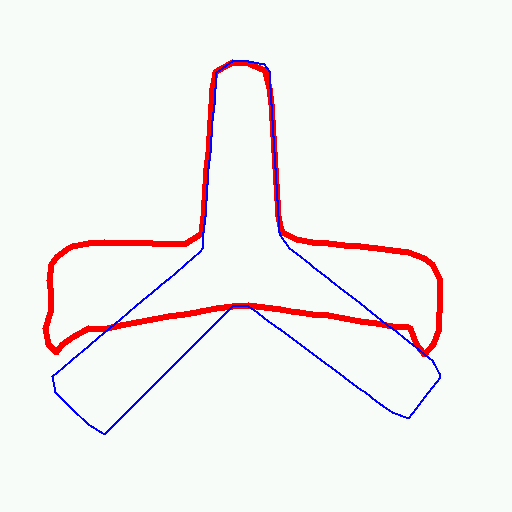
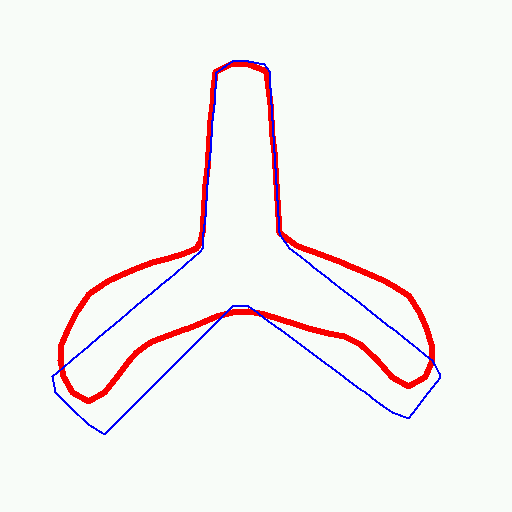
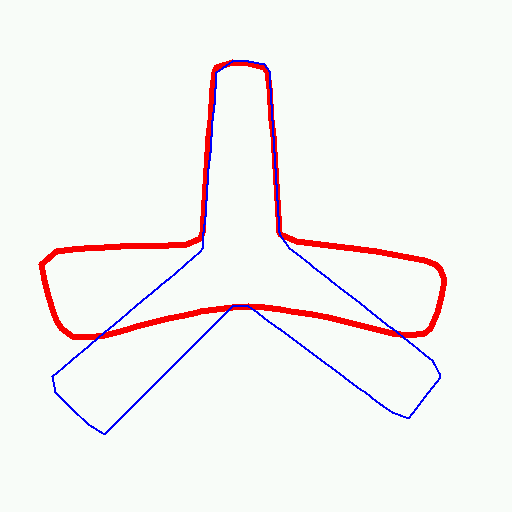
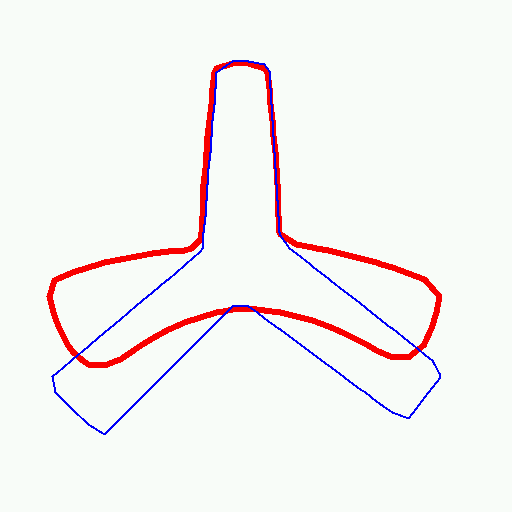
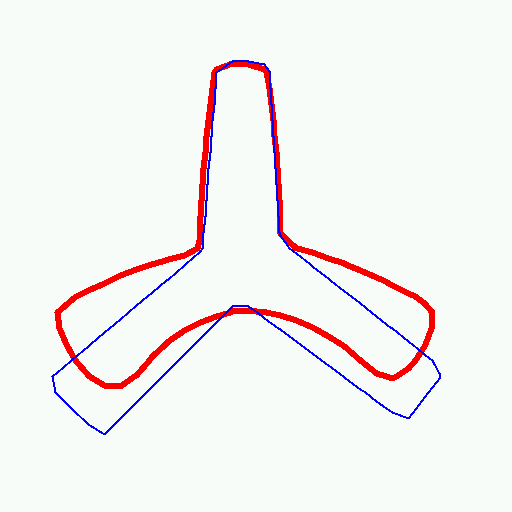
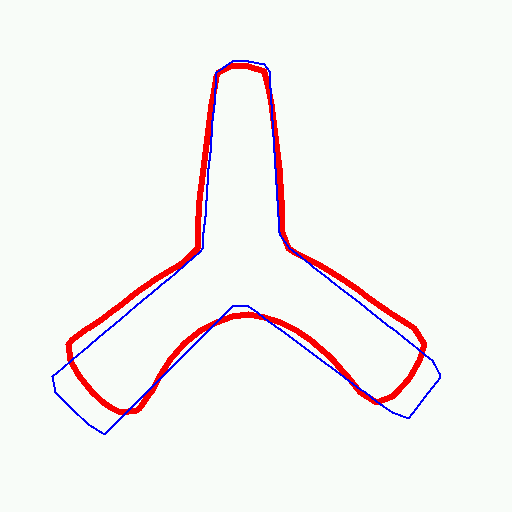
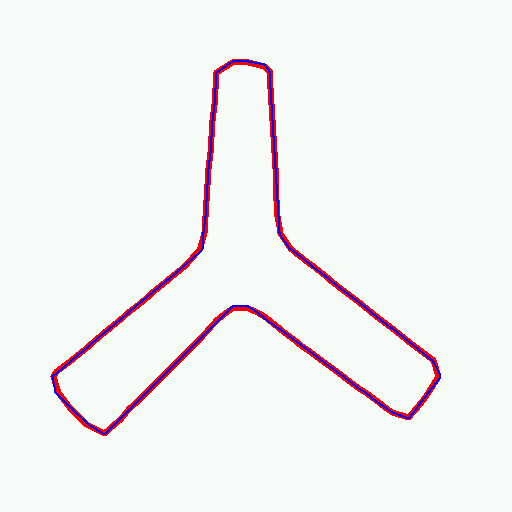
Initia- -lisation | Evo- | -lu- | -tion |
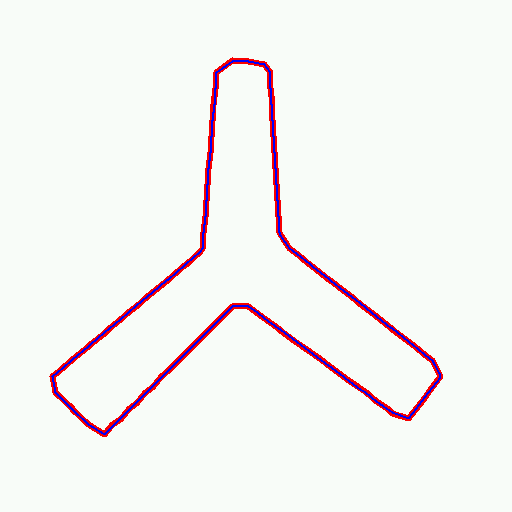
Conver- -gence | | |
Click for the movie |
|---|
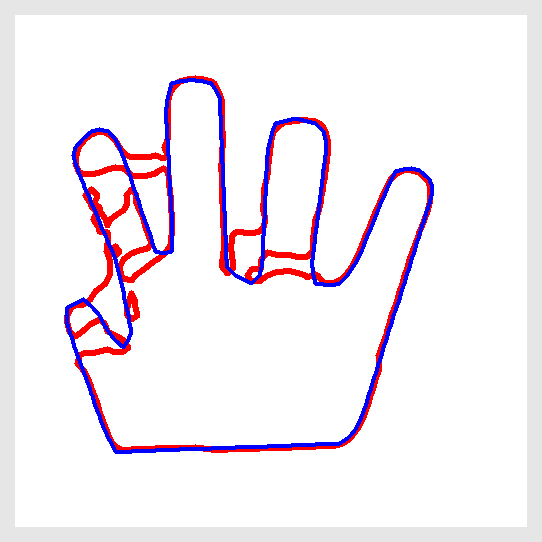
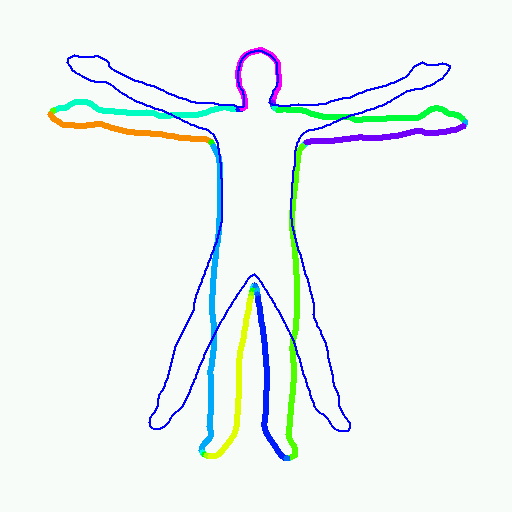
| Two real human body shapes: |


|
||||||
|
|
|
|
|
| | |
 |
|
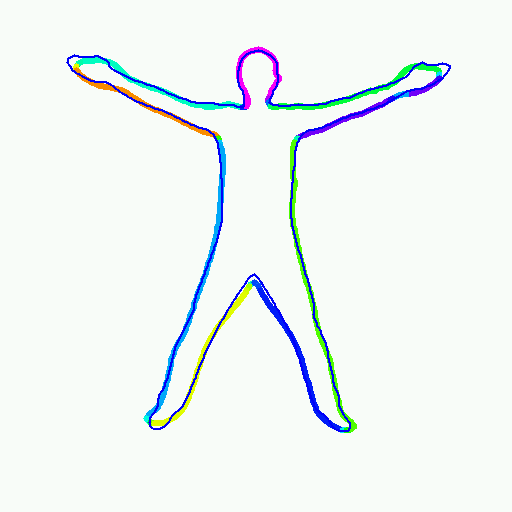
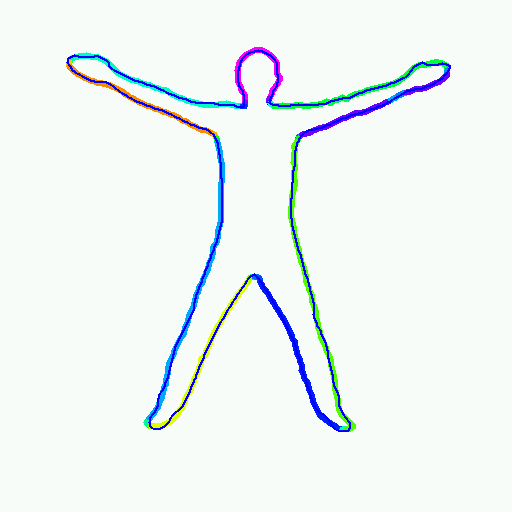
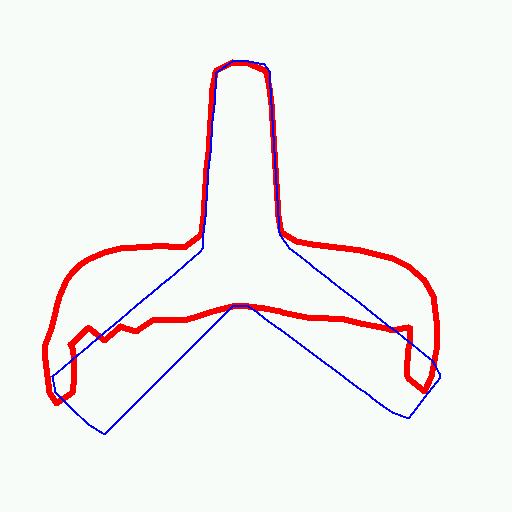
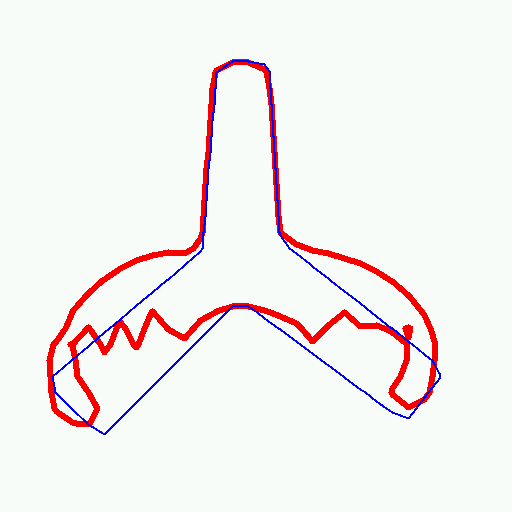
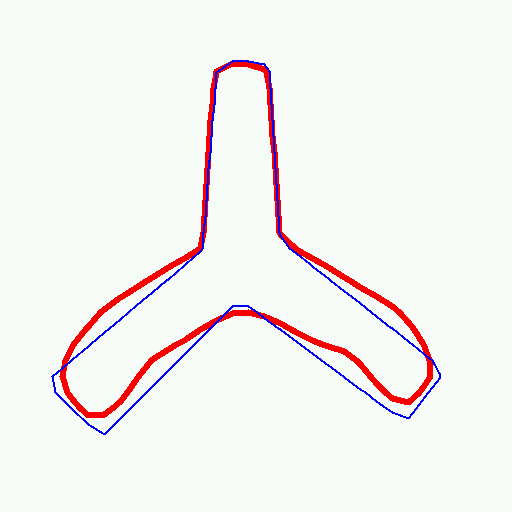
Initia- -lisation | E- | -vo- | -lu- | -tion |
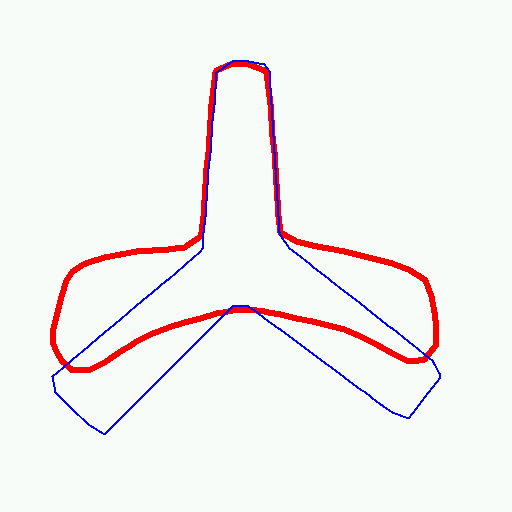
Conver- -gence | | |
Click for the movie |
|---|---|---|---|---|---|---|---|
|
|||||||
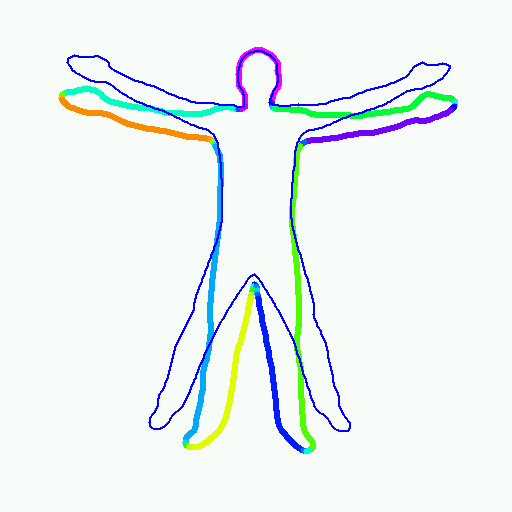
| Standard (L2) prior |
|
|
|
|
|
|
|
| Smoothing (Gaussian) prior |
|
|
|
|
|
|
|
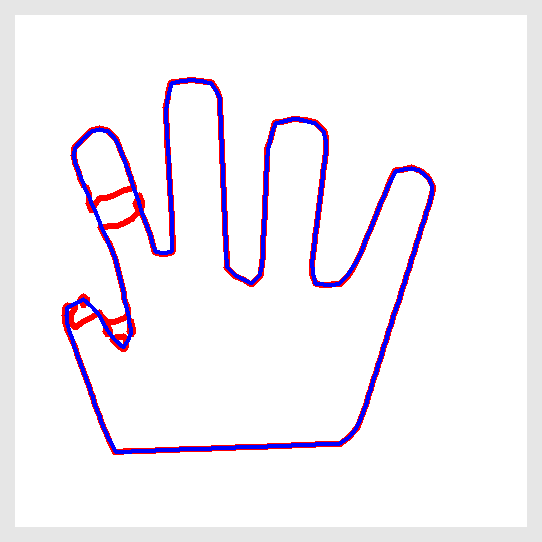
| Locally rigidifying prior |
|
|
|
|
|
|
|
|
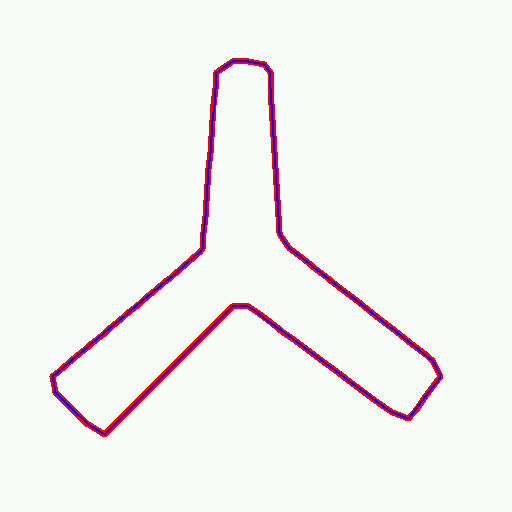
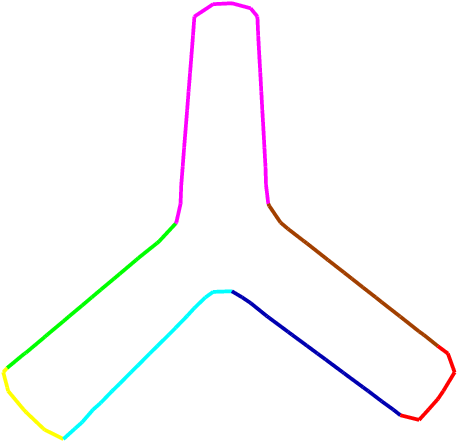
Initia- -lisation | E- | -vo- | -lu- | -tion |
Conver- -gence |
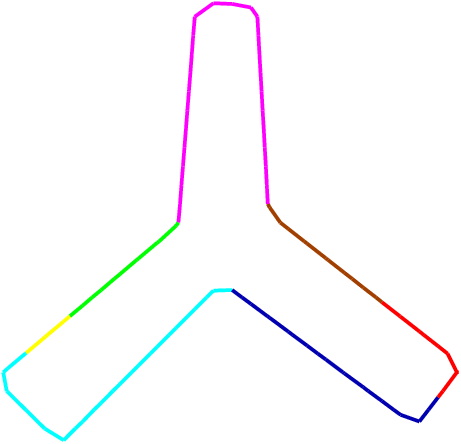
Corresp- -ondences |
|---|