Aim : to build statistics of a set of shapes and estimate suitable metrics, i.e. estimate which shape deformations are probable or not Method : based on correspondences between close shapes, on information propagation via transport on a manifold Difficulties : to handle very varied shapes, without training set density assumption (i.e. we do not suppose that we have seen all possible shapes during the training phase); also, shape matching is not reliable if the shapes are too different Application : shape matching, shape priors, and, further, image segmentation with shape prior
Correspondence flow
To find point-to-point correpondences between two shapes, we search for the most reliable path between them in the graph of all already-observed shapes. The most reliable path is usually a set of small reliable steps (it is more reliable to match shapes that are relatively similar, than shapes that are very different).
Here are two pairs of shapes, with, in each case, the optimal path (in the associated training set of shapes) between them. Then we are able to associate each point of each shape to its corresponding point on the other one. Then, a gesture applied observed on one shape (i.e., a deformation) can be transported to the other shape (since we know the correspondences), and we can let the other shape undergo the gesture as well.
Information propagation
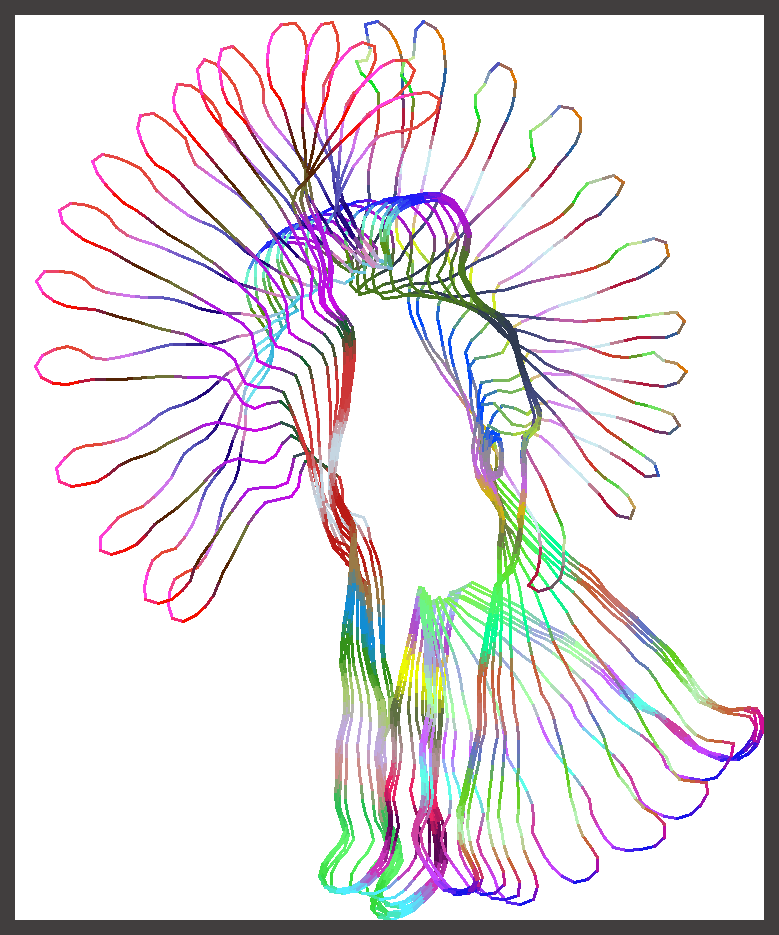
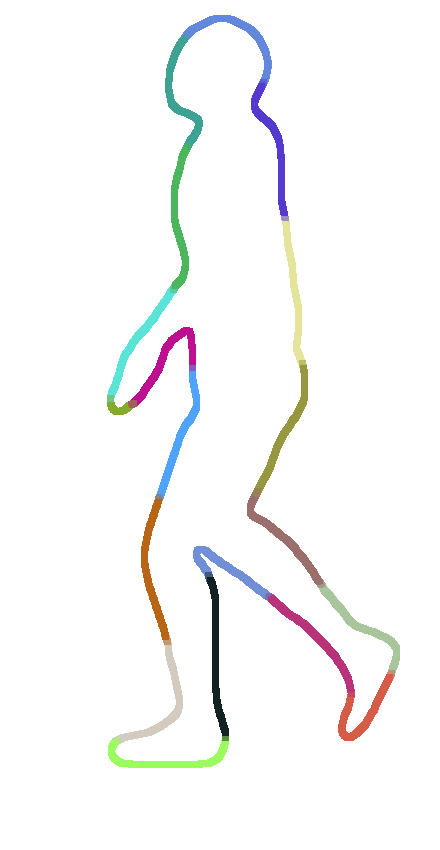
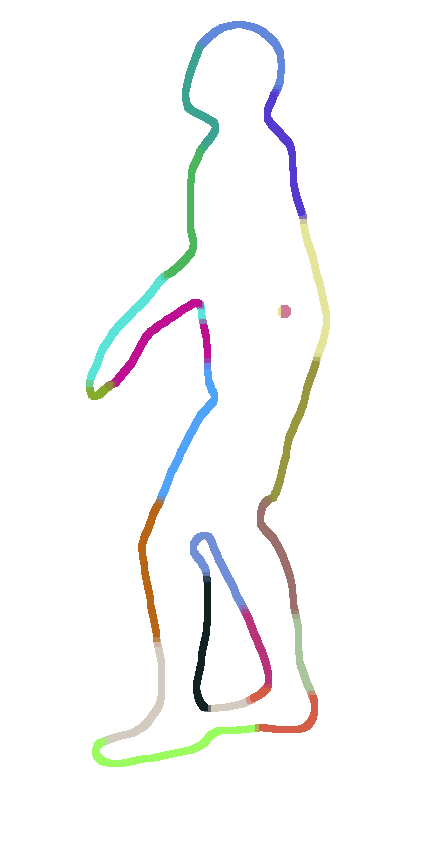
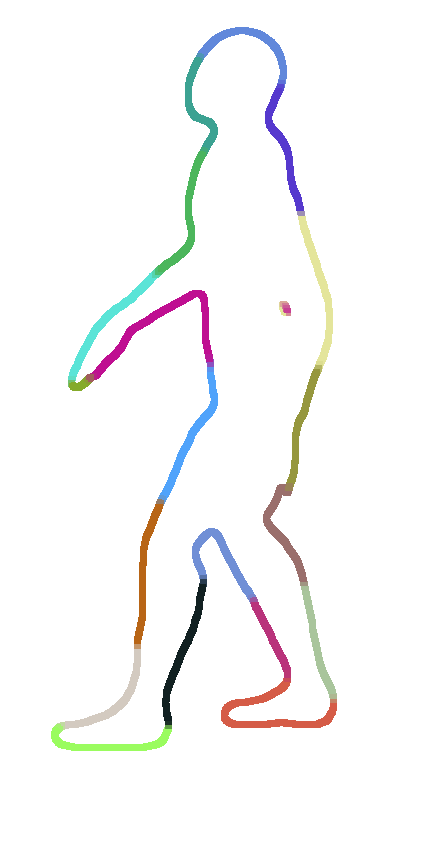
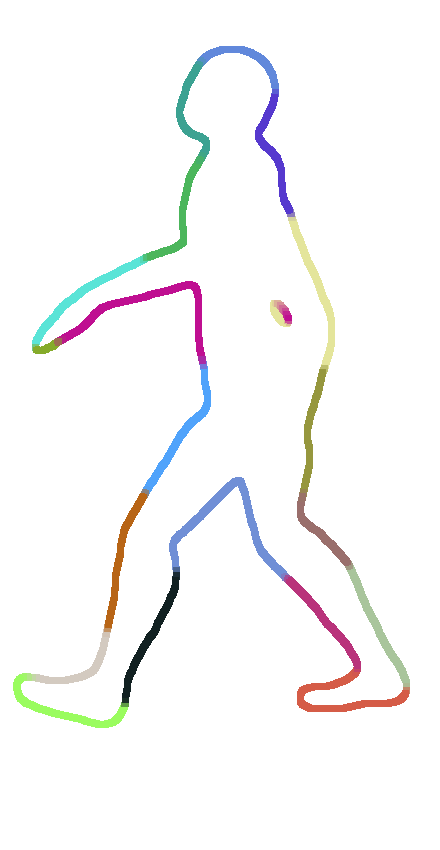
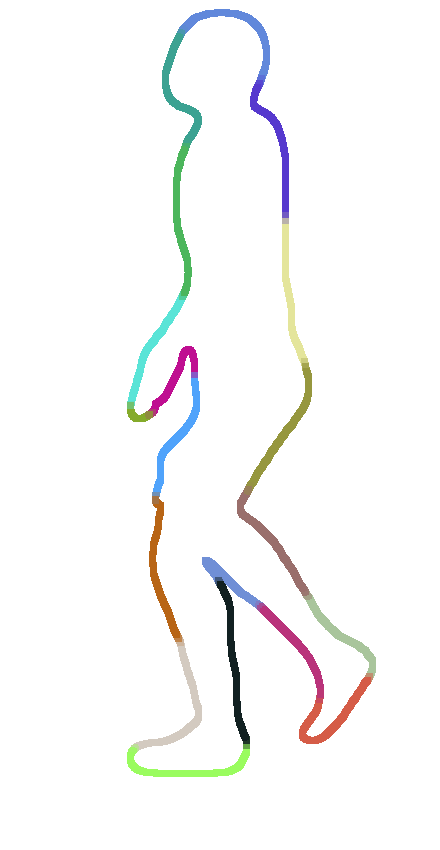
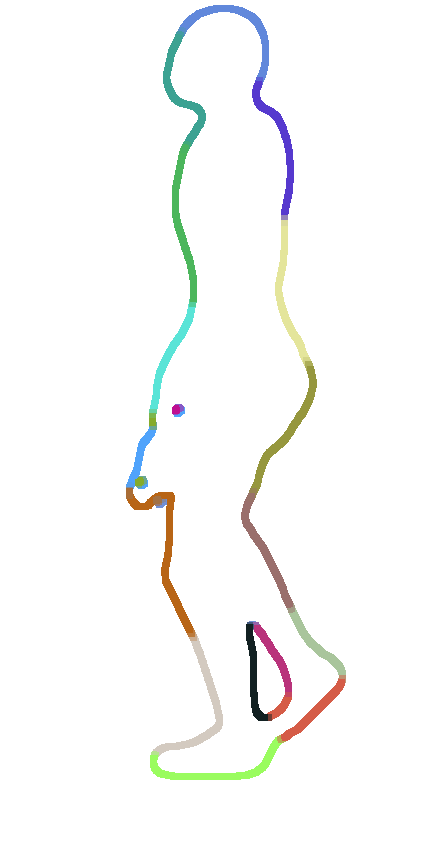
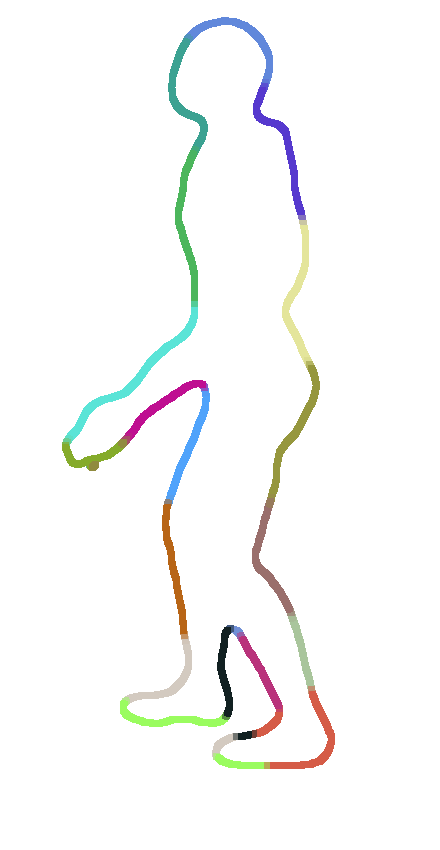
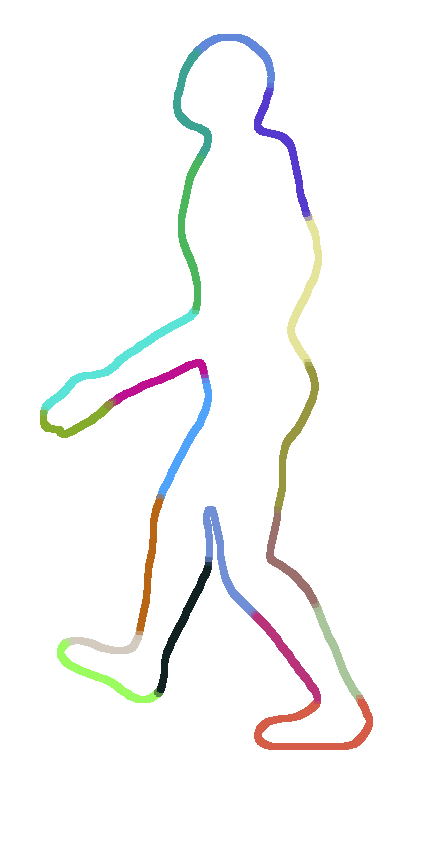
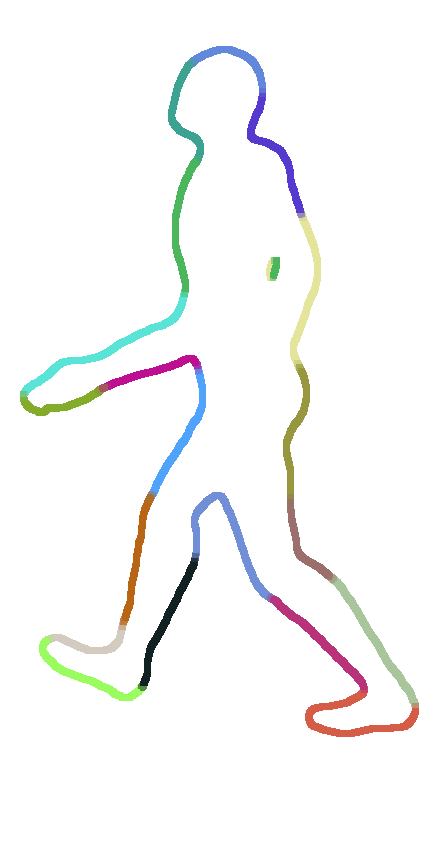
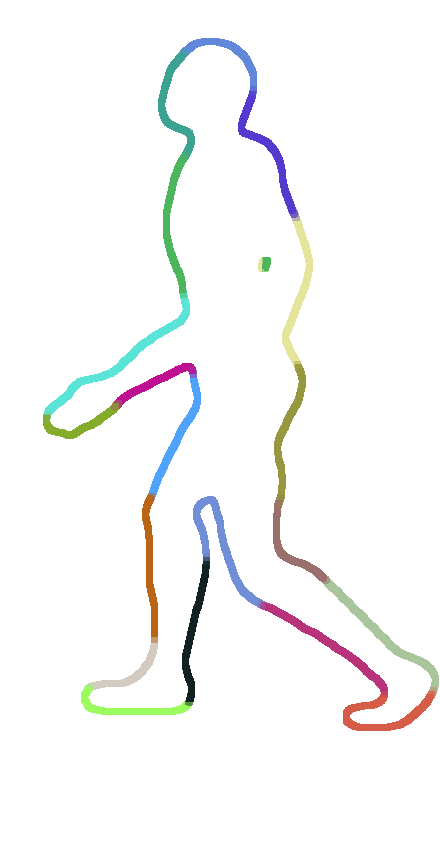
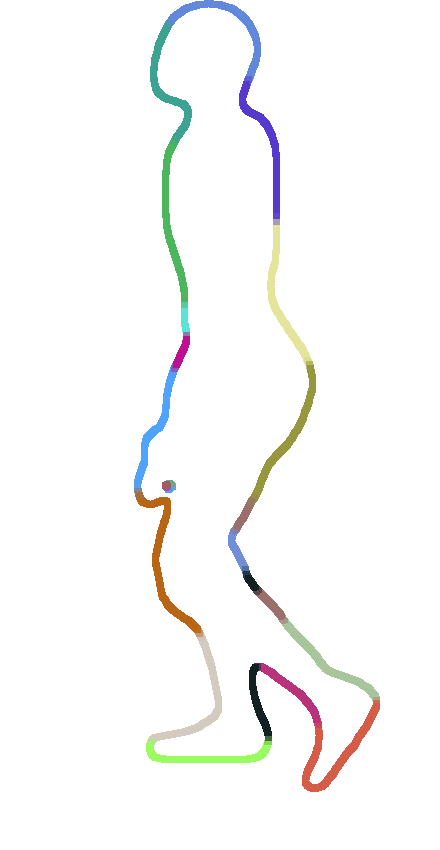
Through point-to-point correspondences between shapes, we can propagate information (and since we know the reliability of the correspondences, we know how reliable the propagated information is). For example, if we assign colors along one shape from one frame in a video, we can propagate the colors to the other shapes from other frames. Points which are in correspondences will then share the same color. Thus we can visualize easily the quality of the correspondences found.
→
This is better visualized with a video :
or
.gif
.mpg
Dancing silhouette
We consider a video from Grimage platform, Inrialpes, for which we are given the segmentation of all frames. Here are a few sample frames (click on any of them to watch the video):
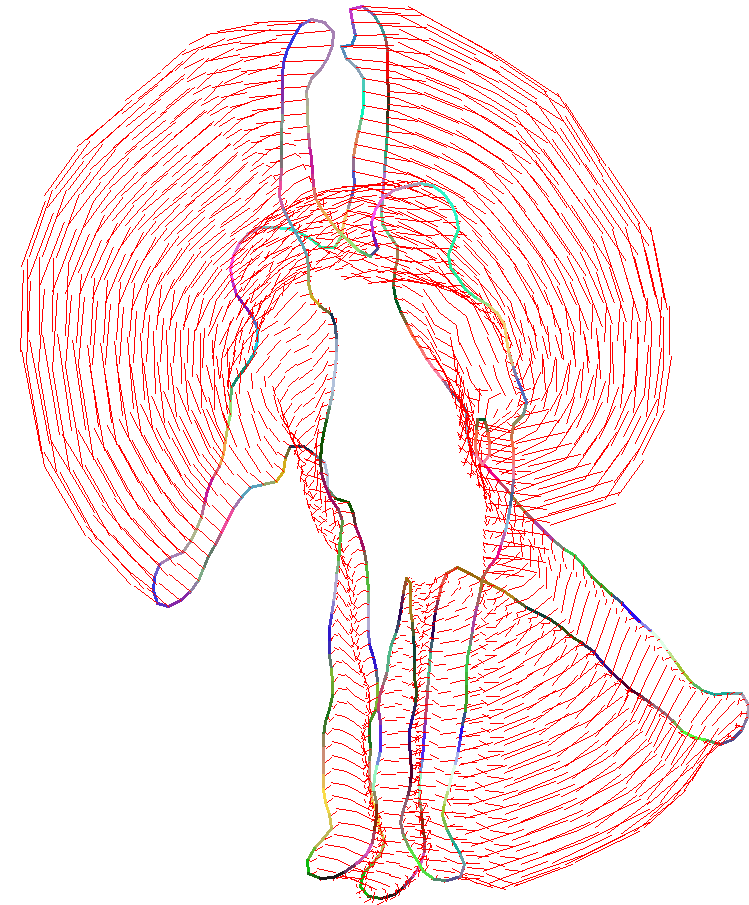
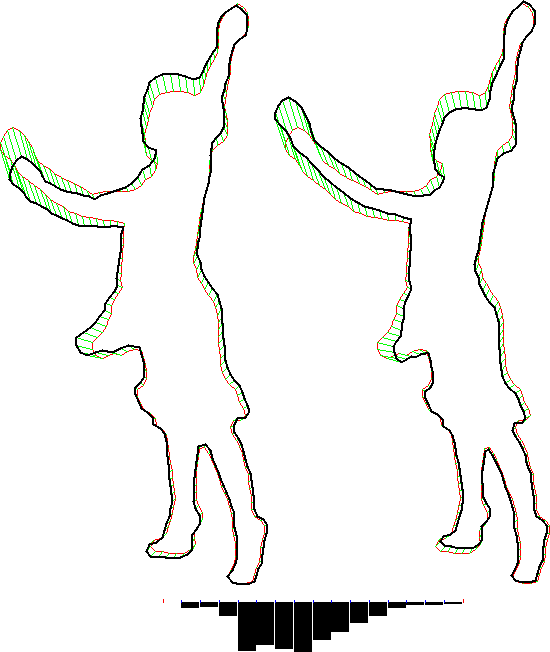
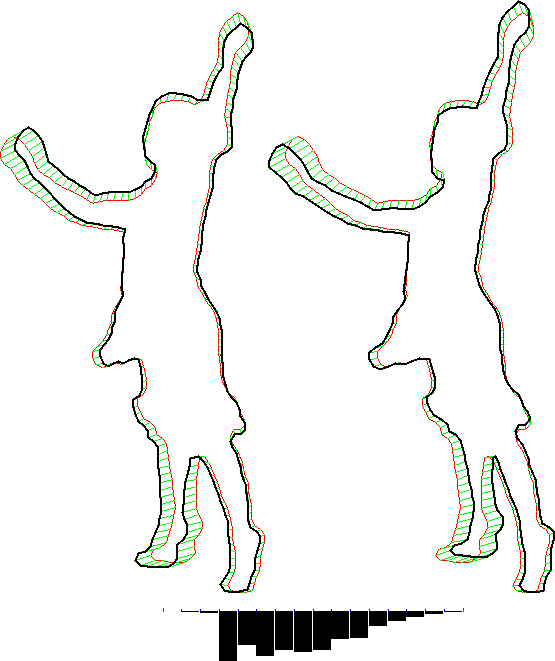
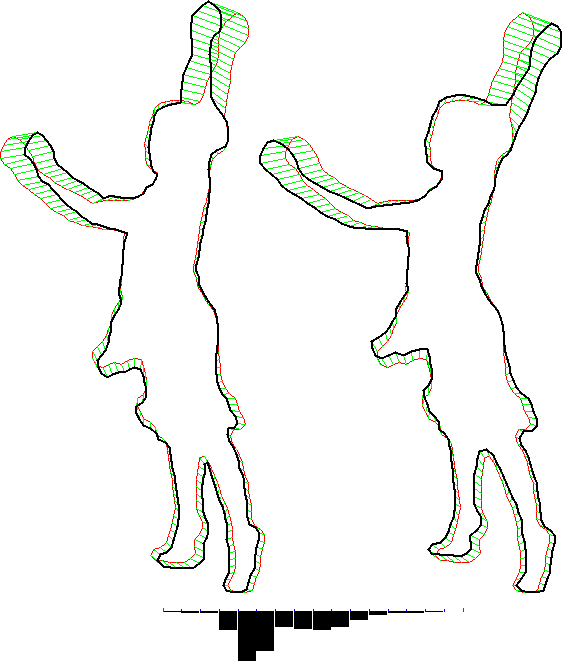
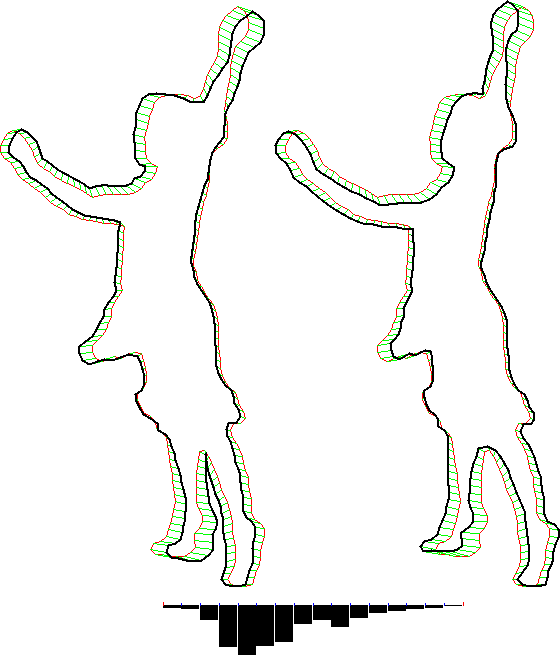
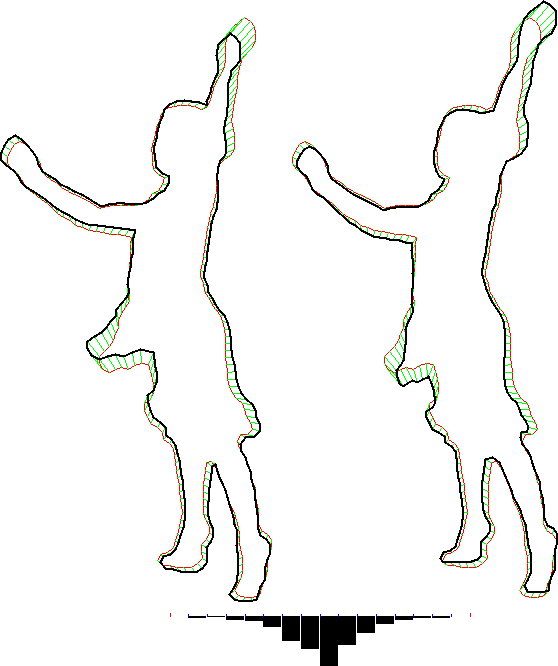
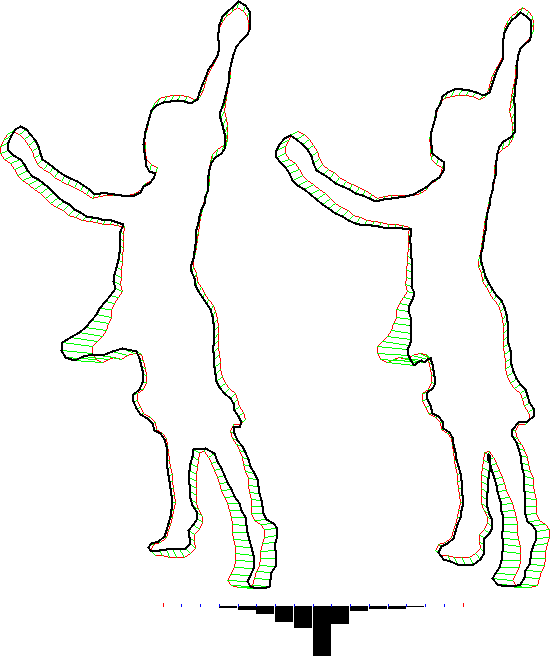
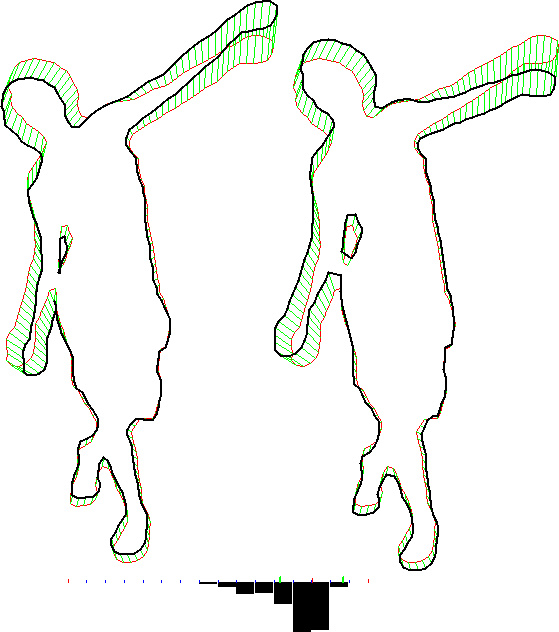
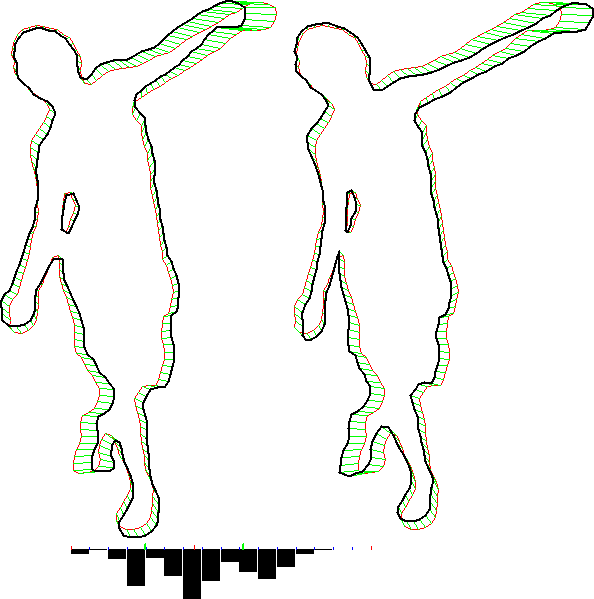
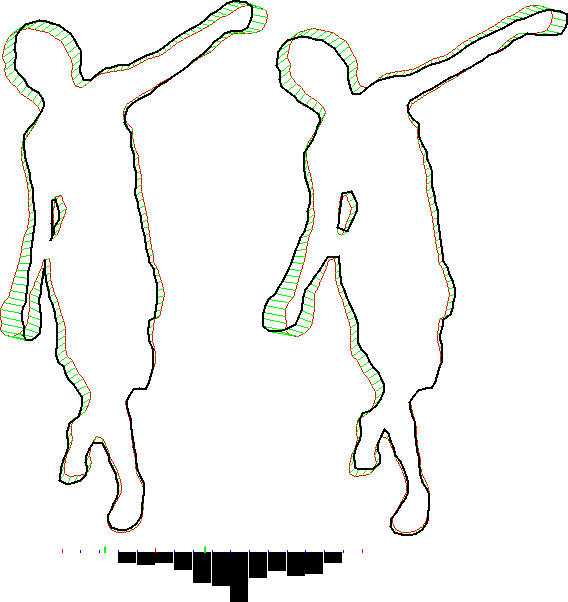
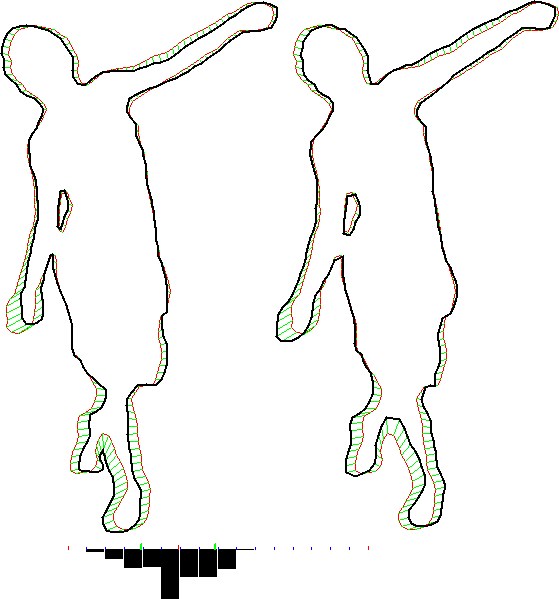
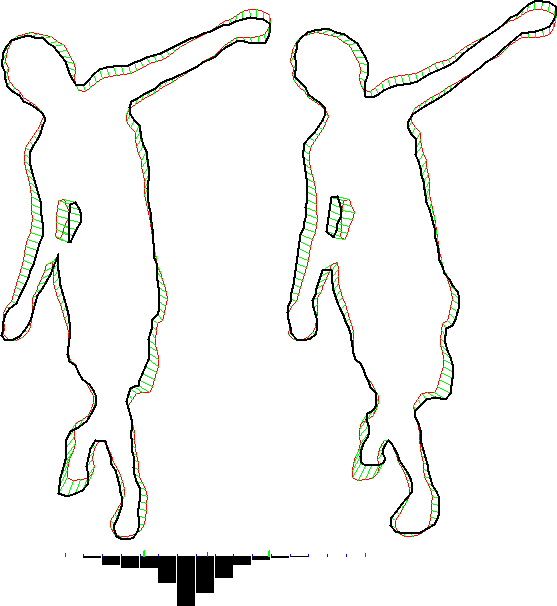
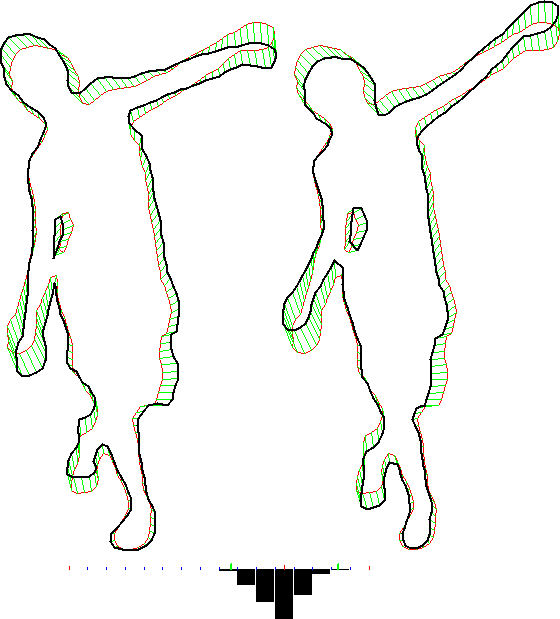
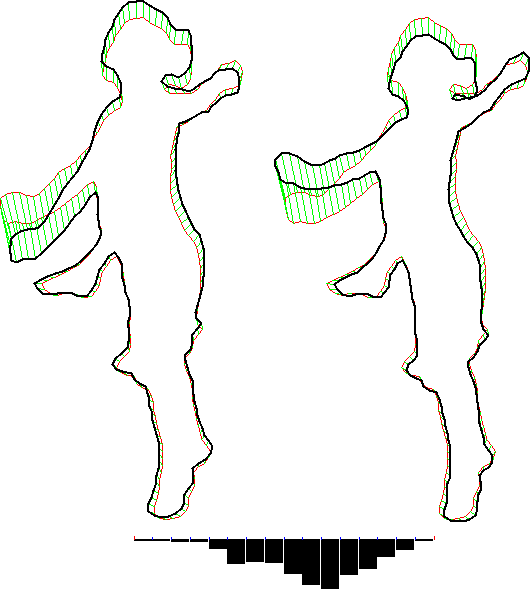
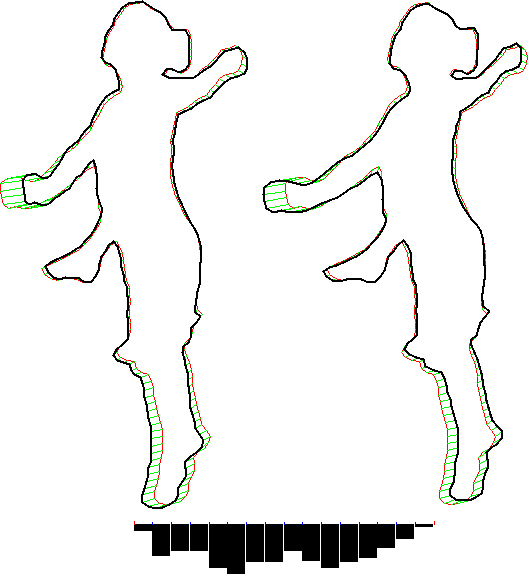
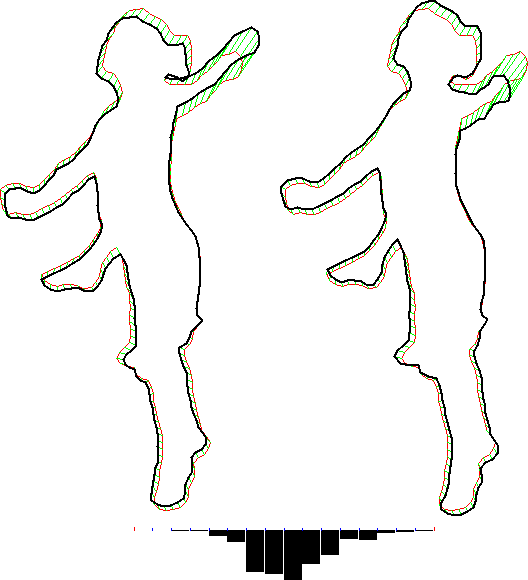
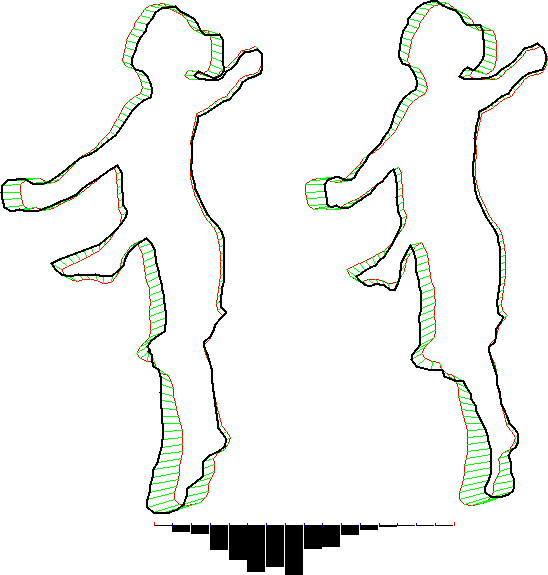
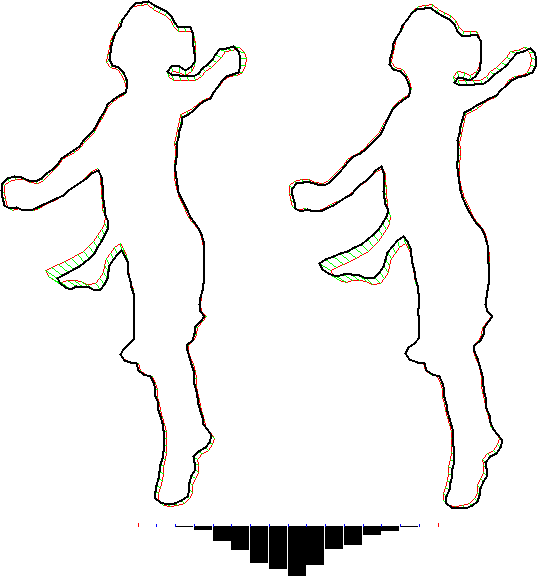
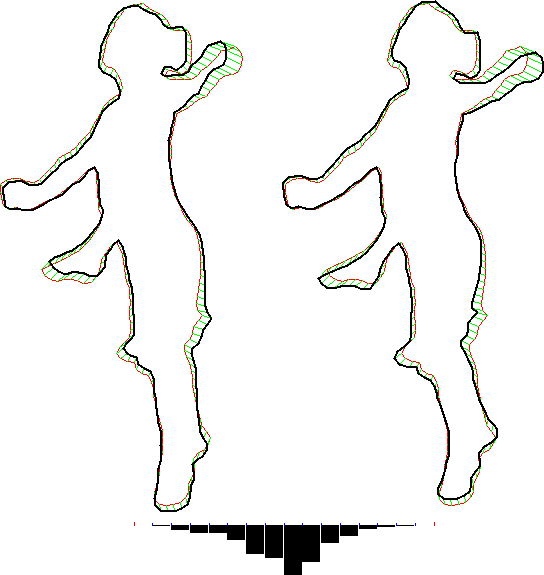
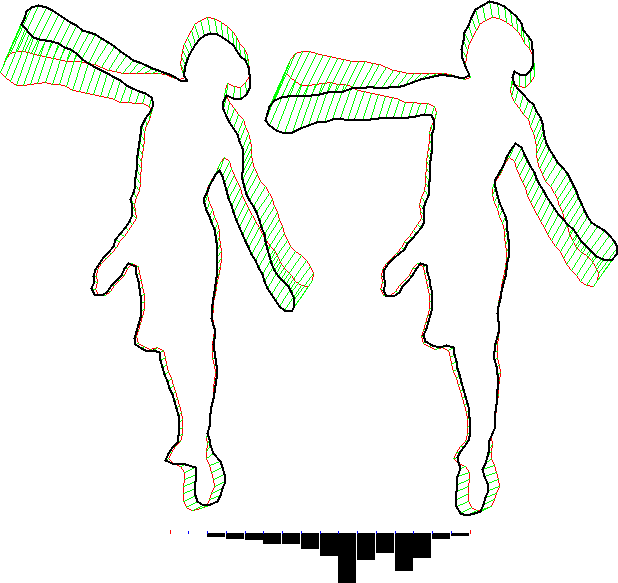
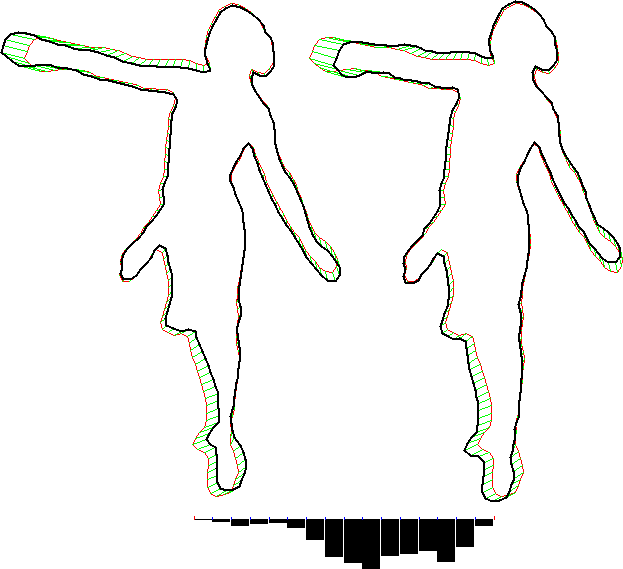
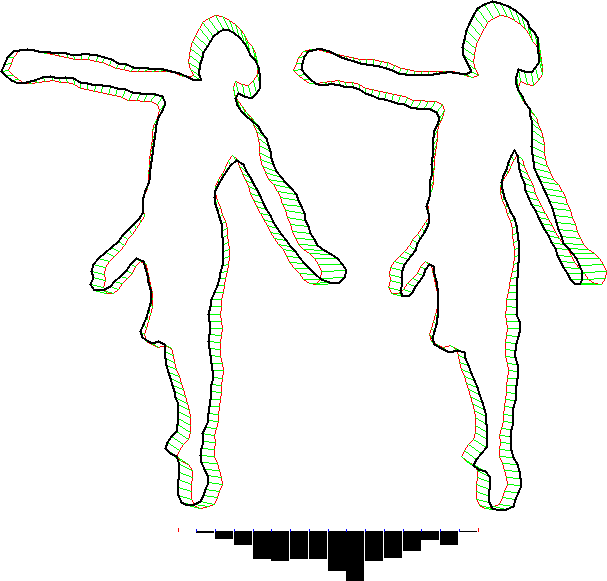
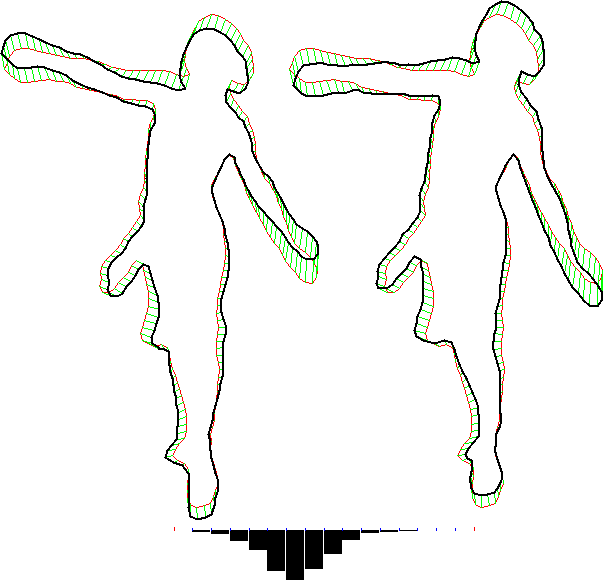
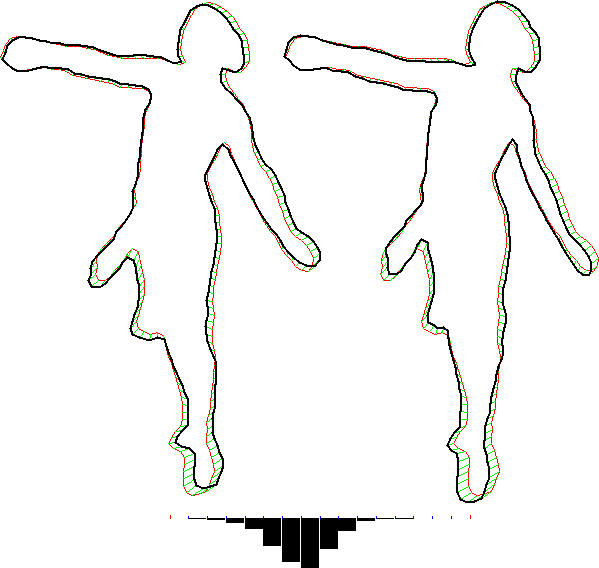
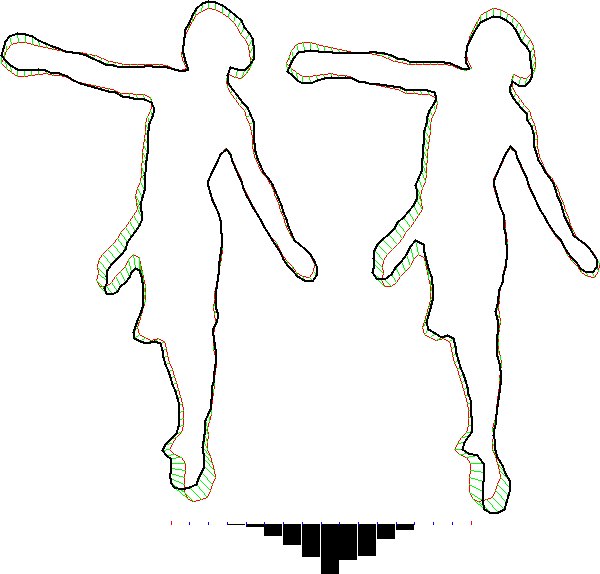
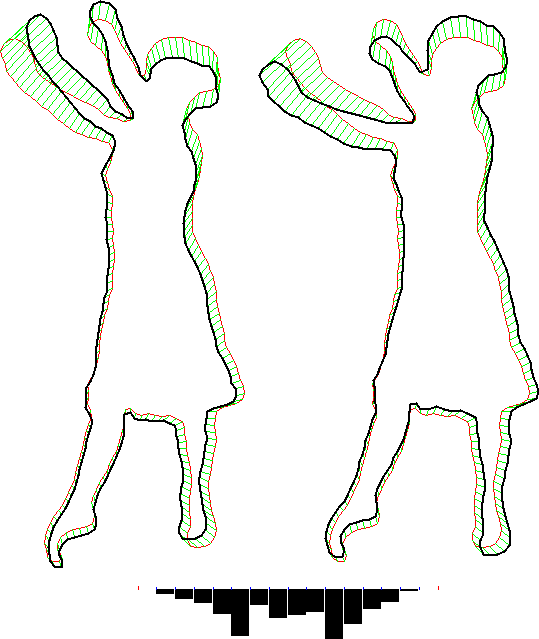
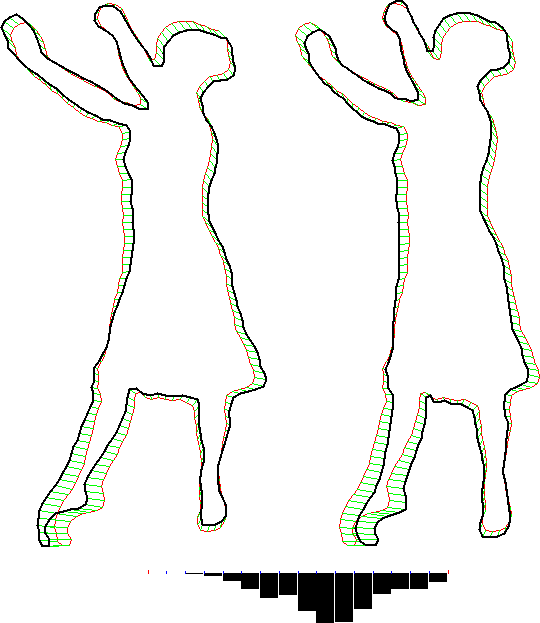
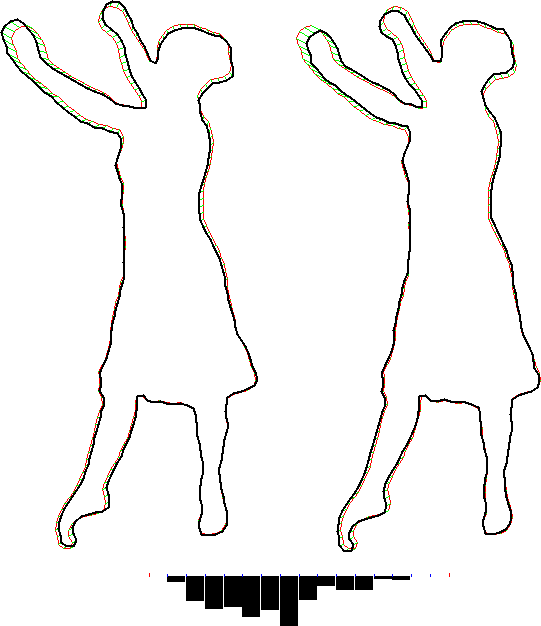
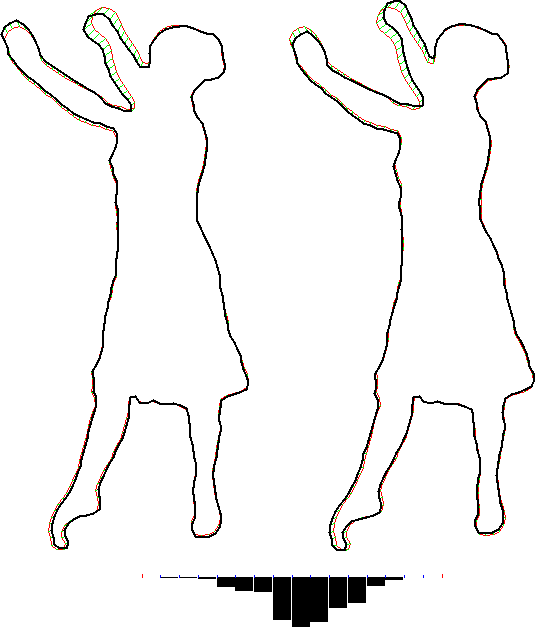
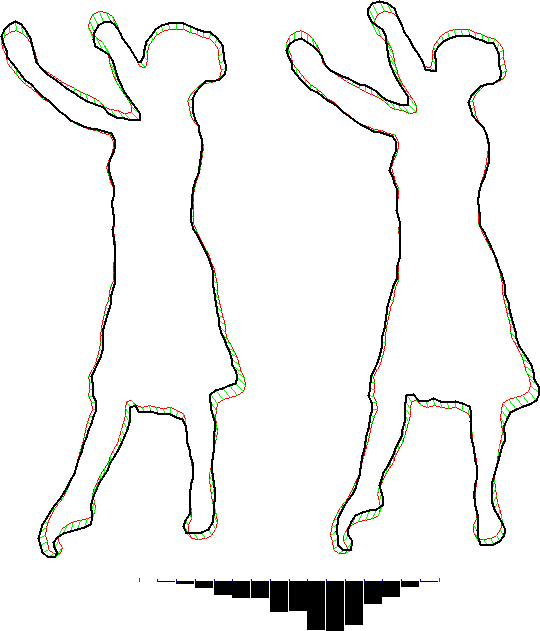
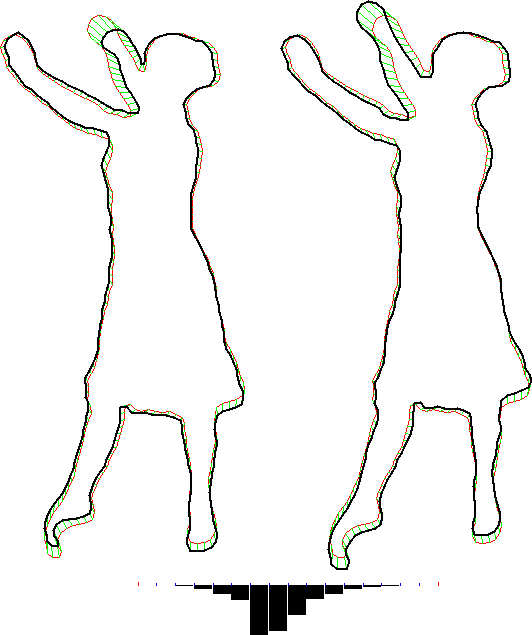
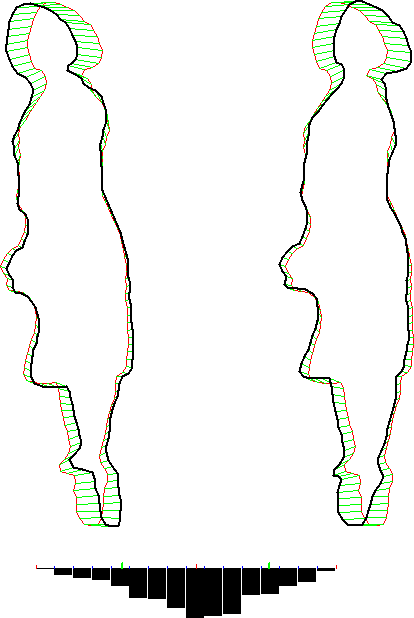
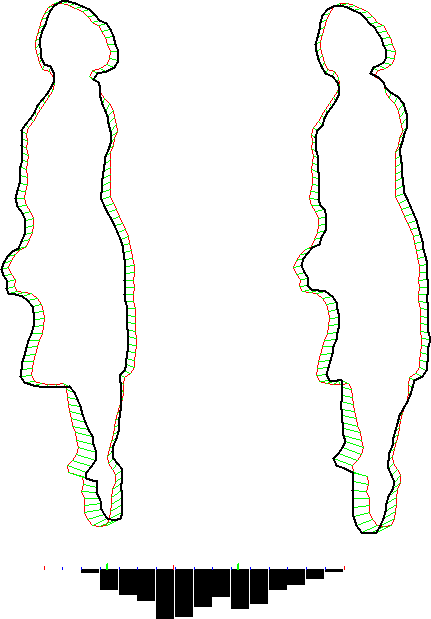
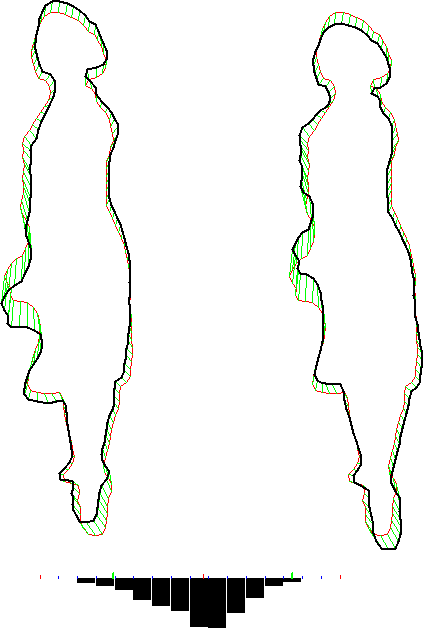
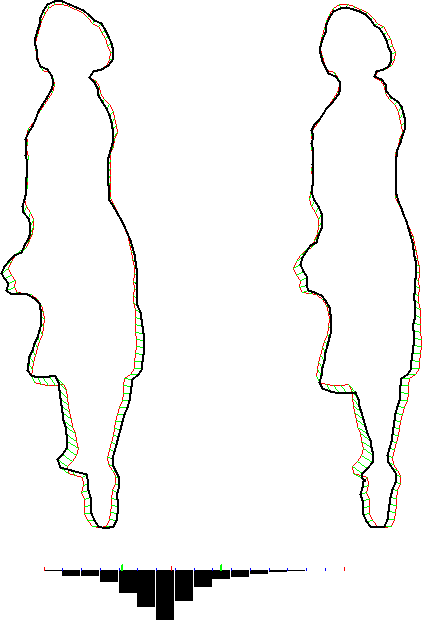
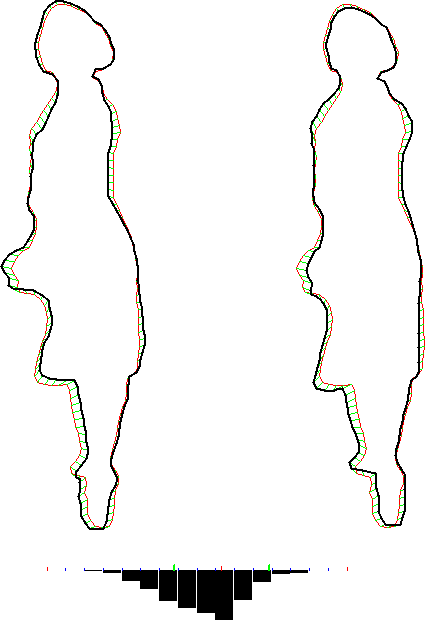
For any posture, we can estimate the most probable motions, in order to know what kind of deformation the posture is likely to undergo. We show here the first modes of deformation for different postures; note that they seem to be articulated and make sense for a human silhouette (while we have no articulated model of a human in these experiments, and while in the video, each posture undergoes only one movement, which is not representative of all movements that this posture can undergo):
1st mode
2nd mode
3rd mode
4th mode
5th mode
6th mode
Posture 1
Posture 2
Posture 3
Posture 4
Posture 5
Posture 6
Each deformation is represented twice, once with positive amplitude, and once with negative amplitude (as in forward/backward for gestures). The red shape is the posture considered, the green field is the deformation applied, and the black shape is the result. Click to zoom and see details.