eoTopology< POT > Class Template Reference
Defines the interface of a swarm topology. More...
#include <eoTopology.h>
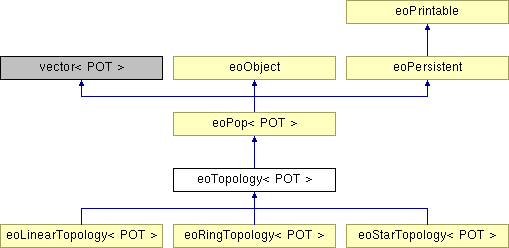
Inheritance diagram for eoTopology< POT >:
Public Member Functions | |
| virtual void | setup (const eoPop< POT > &)=0 |
| Builds the neighborhoods contained in the topology. | |
| virtual void | updateNeighborhood (POT &, unsigned)=0 |
| Updates the neighborhood of the given particle and its indice in the population. | |
| virtual void | updateNeighborhood (eoPop< POT > &_pop) |
| Updates the neighborhood of the given particle thanks to a whole population (used for distributed or synchronous PSO). | |
| virtual POT & | best (unsigned)=0 |
| Builds the neighborhoods contained in the topology. | |
| virtual POT & | globalBest ()=0 |
| virtual void | printOn ()=0 |
| Prints the neighborhoods contained in the topology. | |
Detailed Description
template<class POT>
class eoTopology< POT >
Defines the interface of a swarm topology.
Can be static (usually the case for the social topologies) or dynamic. It's the same interface for both social and physical topologies. ("social" topology means social-neighborhood-based toplogy and so on ...)
Definition at line 39 of file eoTopology.h.
The documentation for this class was generated from the following file: