WILD and WILDER are two large high-resolution wall-size displays, while EVE-Room is an immersive CAVE environment. These three platforms are designed for supporting advanced research in human-centered computing and were funded primarily by the Equipex Digiscope and Equipex+ CONTINUUM infrastructure projects.
The WILD platform
Operational since February 2009, WILD (Wall-sized Interaction with Large Datasets) is 32 screens based wall of 5.5 m long by 1.8 m high (9.9 m2) enabling ultra-high-resolution display of a total of over 1 billion pixels. A cluster of 16 computers is required to drive this array of displays. This platform is also equipped with a 3D motion tracking system, an interactive whiteboard and various interactive devices (tablets, gyroscopic mouse, etc.) enabling real time interaction with massive data. The technical manager is Olivier Gladin (Inria).

Technical description
- Display : 32 (8x4) 32" Dell UltraSharp 8K monitors, 7,680 x 4,320 pixels each
- Size : 5m50 x 1m80 (9.9 square meters)
- Resolution : 61,440 x 17,280 = 1,061,683,200 pixels
- Cluster : 16 computers, Dell Precision T7910 tower with 2 Intel Xeon 3.5GHz CPU and 2 Nvidia P5000 graphics card each
- Motion tracking: 10 camera VICON real-time motion tracking (.5mm accuracy)
- Audio : 7 speaker spatialize sound, ambient microphones, Lavallier microphones, headphones for 3D sound
- Whiteboard : one 55" Microsoft Surface Hub, two 65" 4K Iiyama touch displays with adjustable pedestal (height + tilt)
The WILDER platform
Built in February 2015, WILDER is a mosaic of 75 ultra-thin (<7mm) bezel screens assembled to create a display surface of 11.8 m² (5.9 m x 2 m) for a total resolution of over 69 million pixels. This platform, controlled by a cluster of 10 computers, is associated with a motion tracking system, a multi-channel audio restitution system and a multi-touch frame making the entire surface interactive for several simultaneous users. The technical manager is Olivier Gladin (Inria).

Technical description
- Display : 75 PLANAR 20" tiles, 960 x 960 pixels each, with ultra-narrow bezels (image gap < 7 mm)
- Size: 5.9m x 2m = 11.8 square meters
- Resolution: 14,400 x 4,800 = 69,120,000 pixels,
- Touch : PQLabs 32-point multitouch frame
- Cluster: 10 x 3.7GHz quad core Intel Xeon PCs with an NVIDIA Quadro K5000 graphics card each
- Motion tracking : 6-camera 3D real-time tracking VICON system
- Sound : 8-speaker spatialized sound, Lavallier microphones, headphones for 3D sound
- Whiteboard : one 55" Microsoft Surface Hub, two 65" 4K Iiyama touch displays with adjustable pedestal (height + tilt)
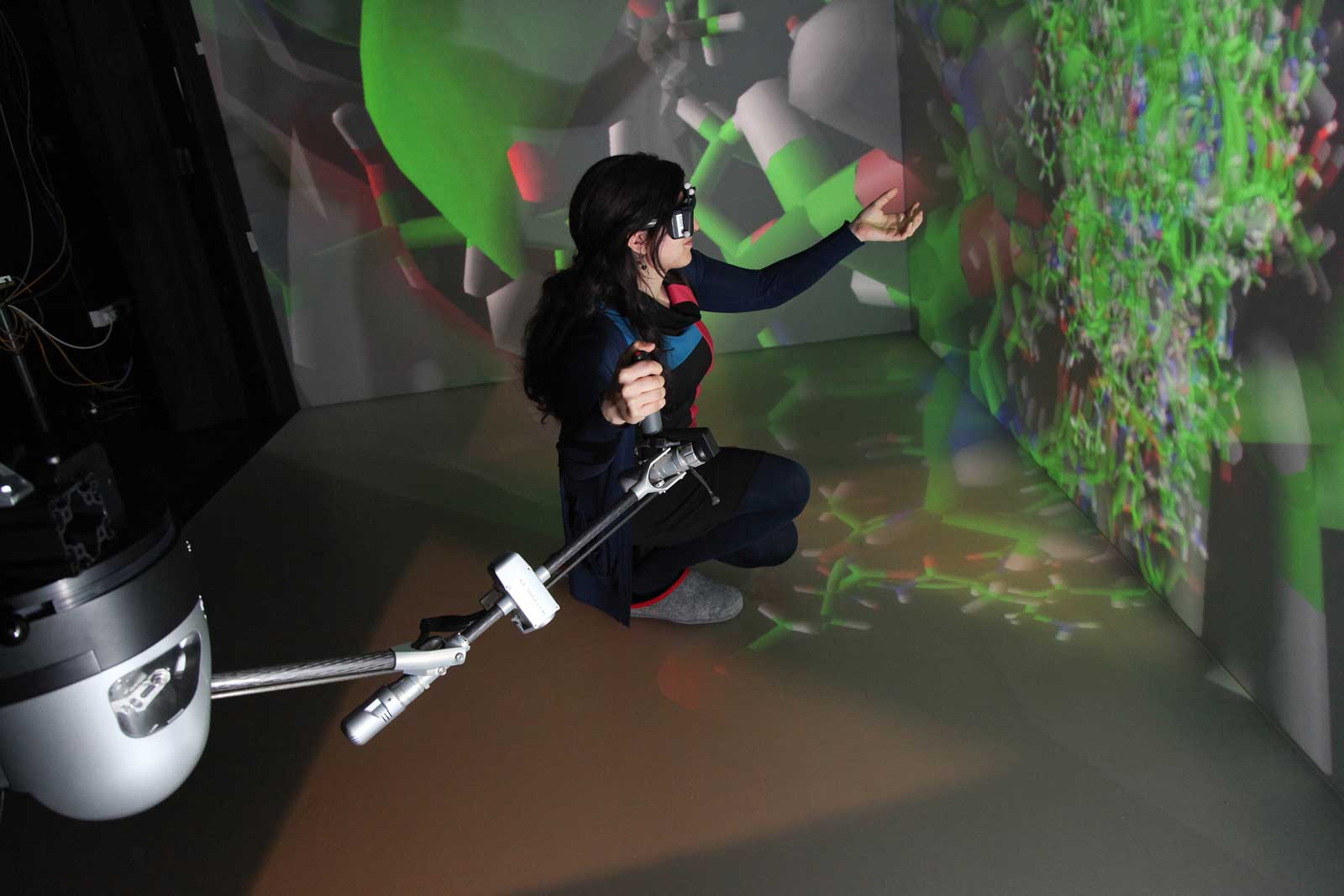
The EVE-Room platform
EVE (Evolutive Virtual Environment) is designed to provide 3D perception to multiple users in a large reconfigurable immersive space. Built in an acoustic space, EVE is equipped with high-end 3D audio system, haptic peripherals and a system for tracking people and objects in 3D. EVE's display consists of several 5m2 HD screens around a 13m2 glass floor. The dual stereoscopic display enables co-located collaboration in an immersive environment. The technical manager is Nicolas Ladevèze (LISN-ASARD).
Technical description
- Display : Rear projection on 4 sides 5m high and 13 m2 glass floor.
- Size : height: 4m70, floor: 2m70 x 4m80 (13 m2)
- Resolution : HD projectors, 1920 x 1080 pixels = 14,515,200 pixels
- Display : Single stereoscopic on double height, or double stereoscopic on single height. The right side can be rotated to create a larger two-sided vertical space.
- Motion tracking : ART 3D system with 9 cameras
- Audio : Spatialized sound
- Haptics : Haption Scale-1 haptic arm covering the whole space.
Eve-Room became operational in May 2010 and is the result of several years of research and development. Its origins trace back to the MUSE project launched in 2002 an intermediate system that ran for seven years. The total cost of the Eve-Room project is estimated to about 1 M€. However, this infrastructure has recently been dismantled (since 2022) due to building-related problems. A new evolutive virtual environment based on modular LED walls has been designed and is currently in the testing stage.
Examples of results

Evaluating the Extension of Wall Displays with AR for Collaborative Work.
DOI - HAL.
See also ILDA portfolio
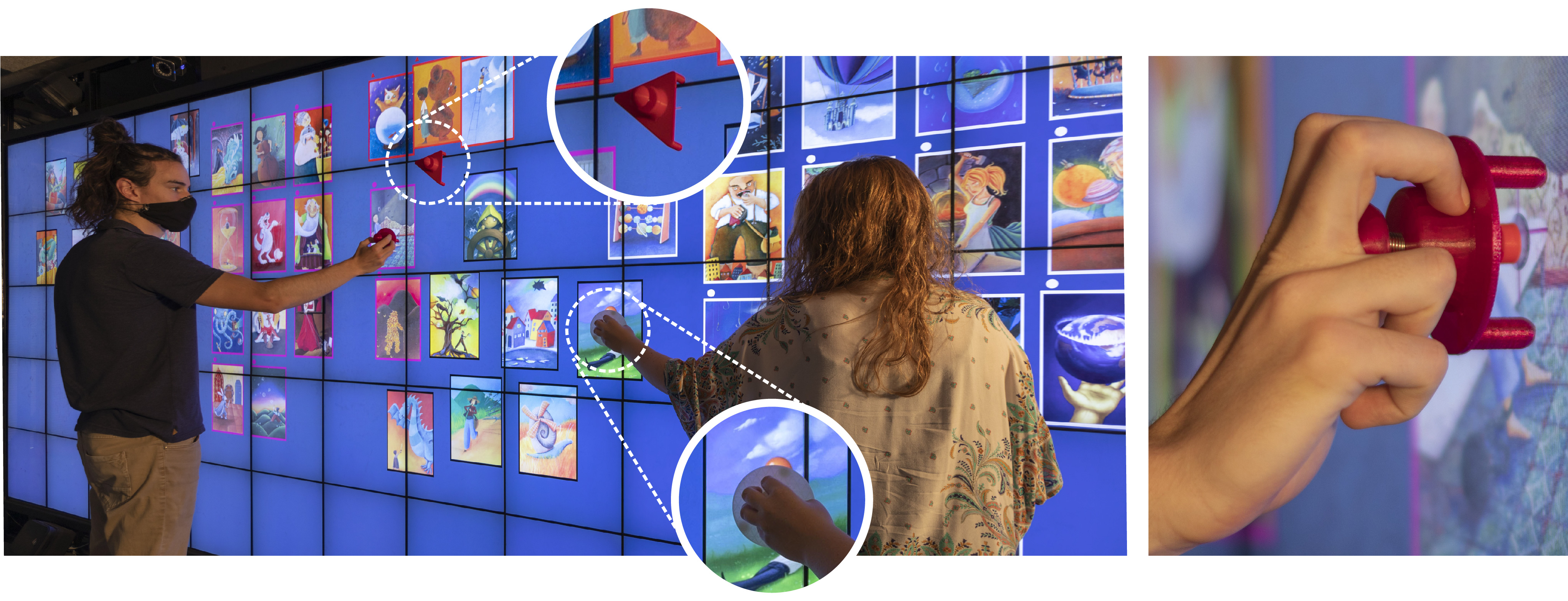
WallTokens: Surface Tangibles for Vertical Displays.
DOI - HAL.


ShapeGuide: Shape-Based 3D Interaction for Parameter Modification of Native CAD Data.
DOI - HAL.
ShapeCompare: Investigating Collaborative Exploration of Design Alternatives on a Wall-Sized Display.
DOI - HAL
These two related projects, carried out with EVE-Room for ShapeGuide and WILDER for ShapeCompare, illustrate the synergy achieved by using these two platforms in the context of the EquipEx equipment projects.
See also VENISE portfolio
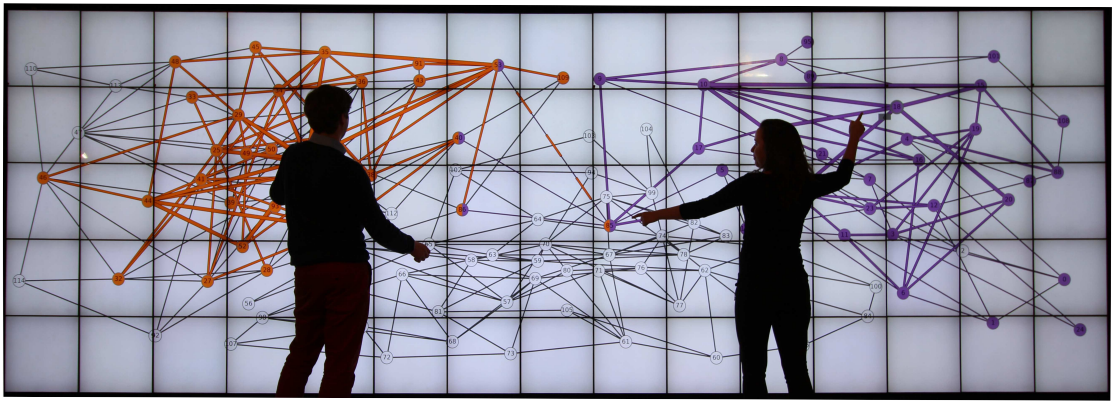
Evaluating Multi-User Selection for Exploring Graph Topology on Wall-Displays.
DOI - HAL.